Amplifiers with Positive and Negative Feedback
CHARLES P. BOEGLI (Product Planning Manager, Bendix Corporation, Cincinnati, Ohio)
Audio, April 1961, Vol 45, No. 4
Contrary to a widely held belief, this author discovered that the cathode-coupled phase inverter (“long-tailed pair”) introduces a significant amount of distortion. By including this stage in the negative feedback loop he achieved an unusually low-distortion amplifier.
Several years ago, the writer had two articles1 published on the design and construction of audio amplifiers utilizing over-all negative feedback with internal positive feedback. A number of readers constructed these amplifiers and satisfaction was the general result.
Those who are interested in the details of these amplifiers should refer to the original articles. Several difficulties were encountered with the circuits, primary among which were:
- The output transformer was not designed for the manner in which it was operated.
- The output transformer secondary was at a small d.c. potential above ground.
- The inverter (the first stage of the amplifier) was not included in the negative feedback loop, so that the distortion introduced by this stage appeared undiminished in the output.
Both amplifiers used ordinary output transformers with the secondaries connected in unusual fashion. The speaker lines were connected to the 0- and 16-ohm taps of the secondary and the 4-ohm tap was grounded (for a.c.), so that a balanced output was being drawn from a transformer intended for unbalanced operation. The output transformer was carefully specified, and those who were foolhardy enough to construct their amplifiers with other transformers usually paid the penalty of instability or oscillation. For some time, the reason why one transformer worked well while another did not, remained a mystery, but it was thought that unbalanced capacitances between each end of the winding and ground might be responsible.
One hundred per cent negative feedback was obtained by connecting the ends of the secondary directly to the cathodes of the driver tubes. Internal positive feedback was brought from each driver plate to the grid of the other driver. Bias for the drivers was obtained by inserting a bypassed resistor between the center tap (that is, the 4-ohm tap) of the output transformer secondary and ground, so that the entire secondary was at a d.c. potential equal to the bias on the driver cathodes. If a speaker line became shorted to the chassis of the amplifier, the bias was disturbed, and oscillation usually occurred. Nevertheless, speaker lines are usually not grounded, and this did not prove to be a very great shortcoming.
The inverter was not included within the negative feedback loop because of the desire to minimize the number of stages in the loop. A cathode-coupled inverter (“long-tailed pair”) was used for inversion. This circuit was widely considered to be quite linear because of degeneration, so placing it outside the negative feedback loop was not expected to cause a significant increase in distortion.
Although the performance of the amplifier was quite good, distortion proved to be somewhat higher than had been anticipated. Since the only real source of distortion could be the inverter, a detailed study was made of the long-tailed pair with results that were, in some respects, surprising:
- If the gain is defined to be the total plate-to-plate output divided by the grid-to-grid input, then the gain of the long-tailed pair is the same as that of a single tube operated under comparable conditions.
- Because of the large d.c. voltage at the cathodes of the tubes, the output signal is somewhat limited in magnitude before distortion becomes excessive.
- The distortion curve for this stage has a shape typical of a circuit without degeneration, suggesting that there is no improvement in linearity because of degeneration.
It was now certain that the inverter was the principial source of distortion in the amplifier. To reduce this distortion, the inverter would have to be included in the negative feedback loop, but it was not known what effect positive feedback around one stage would have on distortion arising in earlier stages. This lack of knowledge, coupled with the desire to explain the instability experienced in the amplifier when small changes were made in certain components, indicated need for further work on amplifiers using combined positive and negative feedback.
These circuits have now been rather thoroughly investigated. This paper details the work that has been done and describes the resulting improved amplifier.
Analysis of Negative-Positive Feedback Amplifiers
Figure 1 is a block diagram for a general amplifier using over-all negative feedback and internal positive feedback. Each amplifier block can be assumed to consist of any number of stages, and in general the terms G and β, which designate gain and feedback factor, can be considered complex variables.
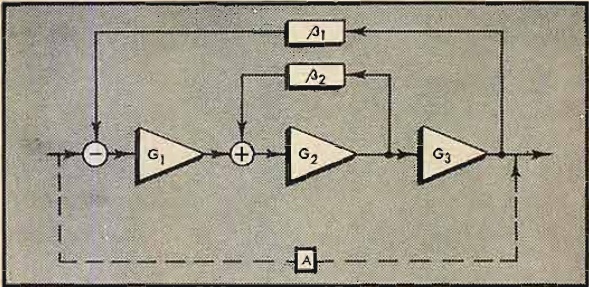
Fig. 1. Amplifier with over-all negative and internal positive feedback.
A straightforward analysis shows that the amplification of the circuit is
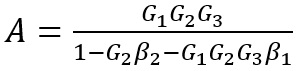 |
(1) |
In the present case, β2 is positive feedback and β1 is negative feedback; when values are substituted into Eq. (1), the appropriate sign must be used (+ for positive feedback and – for negative.)
In the customary analysis of amplifiers of this type, the positive feedback is considered to be adjusted so that G2β2=+1.0, so that if the negative feedback is removed, the stage represented by G2 just oscillates. If G2 β2=+1.0 is substituted into Eq. (1), the resulting expression is
| (2) |
This is the result that would be obtained with an ordinary feedback amplifier if the gain were infinite.
The effect of positive feedback upon the distortion introduced by each stage can be found by assuming a disturbing voltage δ to be injected at the outputs of the various stages, and finding the voltage produced at the same point by the analysis similar to that used to obtain Eq. (1). The following results are obtained:
- For a disturbance δ introduced at the output of G1 or G3, a voltage is produced at the same point amounting to
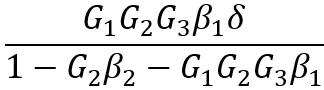
If G2ß2 is adjusted so that it just equals +1.0, this expression simplifies to –δ showing that the distortion introduced anywhere except in the stage around which positive feedback is brought is completely canceled. - For a disturbance δ introduced at the output of G2, a voltage is produced at the same point of magnitude
If G2ß2 is adjusted so that it just equals +1.0, this expression becomes
and when this is added to the injected disturbance δ, the sum is
which represents a reduction in distortion by a factor equal to the loop gain in the absence of positive feedback. The loop gain should be as high as possible even when positive feedback is used, because the distortion arising in the stage around which positive feedback is introduced is reduced in this manner.
One very interesting observation about Eq. (1) can be made immediately. Suppose the internal feedback network is actually arranged so that G2ß2=+1.0 at all frequencies from zero to infinity. Equation (1) then simplifies ideally into Eq. (2); that is, the over-all gain is completely independent of the individual G’s (even though they might b complex quantities) and is simply the inverse of the negative-feedback characteristic. The ß1 can however, be held constant over an exceedingly wide frequency range; certainly, if it should be desired, down to zero frequency and also up into the radio frequencies. It should then be possible to obtain a flat and level response from the entire amplifier even with internal stages and, in particular, an output transformer, of very poor characteristics. No problems of instability would enter except when ß1 became zero which, as we have seen, can be at frequencies very much higher than those of interest in audio work. At such frequencies, of course, rather drastic steps could be taken to insure stability.
Unfortunately, the problem of making G2ß2=+1.0 over a wide frequency range itself appears insoluble. No matter how great the precautions, G2 will drop off at high frequencies because of interelectrode and stray capacities; actually, this drop sometimes occurs at frequencies considered to be of interest in audio work. At the low end, it is quite possible by means of conductive feedback to keep G2ß2=+1.0 down to d.c. The results of the attempt are, however, rather peculiar.
Making G2ß2=+1.0 has the effect of causing the stage represented by G2 to oscillate (in the absence of other factors), so this stage can be considered, for the moment, a wide-band untuned oscillator. Now, the effect of keeping G2ß2=+1.0 down to d.c. is to extend the range of oscillation down to d.c.; that is, the stage becomes not only an a.c. but also a d.c. oscillator. A d.c. oscillator, by extension of the definition of an a.c. oscillator, is a device that will generate a d.c. voltage with no external input. Experiments have shown that this is precisely what happens with conductive positive feedback, and the d.c. voltage which then saturates the stage causes it ti be ineffective in amplifying a.c. signals.
For example, a typical push-pull stage incorporating positive feedback is shown in Fig. 2.
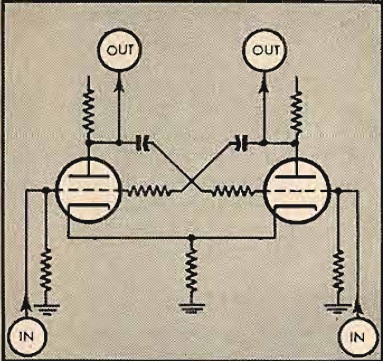
Fig. 2. Push-pull stage with positive feedback.
Its similarity to a multivibrator is at once evident. In fact, the only difference is that the positive feedback is controlled at the point where oscillation just begins, while in a multivibrator the positive feedback is extended down to d.c. by elimination of the blocking capacitors, the stage becomes in effect a flip-flop circuit quite incapable of passing an a.c. signal.
The inference, of course, is that in all practical cases, G2ß2 must drop off at low and high frequencies, becoming less than +1.0. An investigation must therefore be made of the frequency response od G2 with a.c. positive feedback, so that this response can be controlled to prevent instability in the final amplifier.
Stages with Positive Feedback
Consider an amplifier with positive feedback (Fig. 3) and let ß to be constant with frequency from zero to infinity while G drops off 6dB per octave below frequency ω1=1/T1 and above another frequency ω2=1/T2. Then ß may be considered a real quantity while
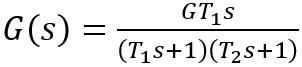 |
(3) |
The T’s are time constants, and s is the Laplace transform argument.
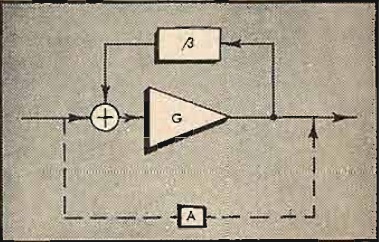
Fig. 3. Amplifier with positive feedback.
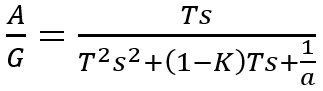
By ordinary feedback analysis, the closed-loop transfer function is
| (4) |
We now make the following substitutions: T2=T, T1=aT, and Gß=K, which transform Eq. (4), after expansion of the denominator, into

In the usual case where positive feedback is considered, K is about 1.0 and a is much larger than 1, so that as an approximation
 |
(5) |
To find the shape of the response curve, jω is substituted for s, and the magnitude of the resulting expression is calculated. This turns out to be
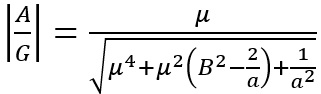 |
(6) |
In which B=(1-K). Since the expression for amplification, Eq. (6), contains only B2, it remains unchanged if –B is substituted for +B; that is, the response will be the same if K is 0.95 or 1.05. The fact that the phase shift in the two cases is different is of no consequence in the present study.
Now, when μ≠0, the amplification, Eq. (6), approaches infinity as the denominator of the expression goes to zero. To find the value that B must have to make the amplification go to infinity at some frequency, we set the denominator equal to zero and obtain
Which is real and positive only when B=0, or μ2=1/a.
In other words, when positive feedback is led around an amplifier and adjusted so that oscillation just begins, that oscillation occurs at a single frequency located at the geometric mean of those represented by the two time constants of the amplifier. Thus, what has ordinarily been assumed to be a wide-band untuned oscillator is in reality a tuned oscillator. Equation (2) was derived from Eq. (1) by substituting G2ß2=+1.0. It is now evident that this condition, and conclusions drawn from it, can exist only at a single frequency in an a.c. amplifier, unless ß2= ß2(jω)=1/G2(jω) for more than one frequency.
The shape of the response curve for a typical amplifier with positive feedback adjusted so that K=1.0 is shown in Fig. 4.
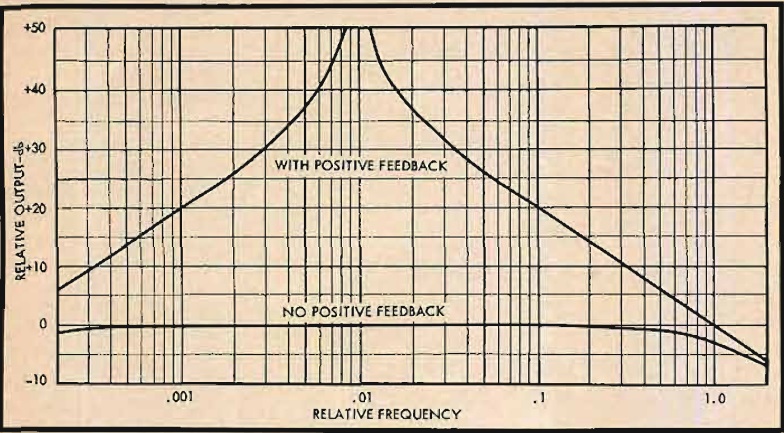
Fig. 4. Response of a single stage with and without positive feedback.
The response rises for
![]()
and falls for
![]()
at 6dB per octave except for a region at the geometric mean where the gain rises to infinity and the slope consequently increases.
It can be shown that if the amplifier transfer function has a different shape, for example so that the response at each end drops off 12dB per octave, the response with positive feedback remains unaffected except for regions near where the relative gain is 1.0. For this reason, it is not possible to alter the shape of the response significantly by changing the transfer function of the amplifier.
If another case is considered in which the amplifier is flat from zero to infinite frequency and the feedback factor drops off in the same manner as was assumed for the amplifier in the first example, the over-all response is unchanged except for regions above 1/T2 and below 1/T1. Once again, the important part of the curve remains unchanged.
These are valuable properties. By using them correctly, it is possible to design an amplifier with negative and positive feedback which shows greater stability and lower distortion than can possibly be attained with negative feedback alone. The logic behind the development of such an amplifier is presented in the next section.
General Amplifier Design
In a three-stage amplifier with negative feedback around the entire unit including the output transformer, oscillation is certain to occur at some frequency where the loop phase shift is 180 degrees if the loop gain at this frequency is equal or greater than 1.0. The problem in the design of such an amplifier has always been to control the response at the extremes of frequency in such a manner that the loop gain is less than 1.0 when the phase shift is 180 degrees. This may be accomplished in several ways. One is to introduce phase-correcting networks. Another is to stagger the time constants of the stages so that two of them are flat out to extreme frequencies and the third has a response that drops off gradually (6dB per octave) toward low and high frequencies. In this manner, the phase shift can be kept at 90 degrees until the loop gain is less than 1.0.
The first method suffers from the fact that the response of an audio amplifier is apt to depend upon the nature of the load, so a fixed phase-correction network may work satisfactorily for one load and fail to prevent oscillation for another. All loudspeakers are not identical. The second method, however, can be used to produce an amplifier completely stable with any previously assigned range of loads. Positive feedback is an ideal way to apply the second method to amplifier design.
The steps in the practical design of a completely stable audio amplifier with over-all negative and internal positive feedback are:
- An amplifier with at least three stages (input, driver, and output) is constructed. The over-all negative feedback loop is closed, and the loop gain is adjusted (by controlling the gain of one of the stages) until the amplifier shows no trace of instability when the worst desired load is connected to the output. This load will generally consist of a resistor of the correct size shunted with a capacitor as large as is likely to be encountered in the use of the amplifier.
In stabilizing this amplifier, a small amount of network phase-correction may be used, but the amplifier should not oscillate even in its absence. Stability may by considered adequate when the high-frequency peak is no longer higher than 2dB. - The positive-feedback loop is now closed, and the time constants of the feedback network are controlled so that the high-frequency peak remains no higher than 2dB. (Remarks relative to high-frequency peaks also apply to low-frequency peaks). Under these conditions, the amplifier is necessarily no less stable than it was with the negative feedback alone.
When the loop gain is adjusted to prevent instability in Step 1, it will generally be found that the final loop gain is quite small. In fact, if the maximum treble drop of the open-loop amplifier is 18dB per octave, it may be shown that the loop gain can generally not exceeded 1.8 before the high-frequency peak exceeds 2dB. A completely-stable feedback amplifier with more than two stages must often have a quite-low loop gain. This places no restriction upon the gain of the amplifier, for if G is the gain of the open-loop amplifier and ß is the feedback factor, then the loop gain is Gß while the gain is
If Gß is fixed, therefore, any value of A may still be obtained by adjusting G. For example, if the loop gain is set at 1.8, the over-all gain will be 0.36G. If the over-all gain is to be 25, G must be set to around 70. With such a completely stable negative-feedback amplifier, the distortion introduced in the various stages will obviously be reduced only a small amount (in the example, by a factor of 2.8). By the converse of this reasoning, the conclusion is reached that negative-feedback amplifiers having high loop gains and in which distortion is brought to a low value tend to be unstable.
That the introduction of positive feedback need now cause no additional instability is evident from the typical response curve of Fig. 4. A 6dB per octave slope in response corresponds to a phase shift of 90 degrees, which is insufficient to cause oscillation. To control the positive feedback so as to prevent the entire amplifier from being unstable therefore simply means that the relative gain of the positive-feedback loop must be 1.0 at the point where the response of the negative-feedback amplifier is just beginning to rise because of phase shift.
The work that has so far been presented indicates that the reason for the instability difficulty with earlier amplifier circuits lay in the failure to control the high-frequency cutoff point for the positive-feedback network. This difficulty might have been remedied by various expedients, but the problem of inverter distortion would still have remained.
Practical Amplifier Design
There are many possible designs for amplifiers incorporating both negative and positive feedback. Before proceeding with a circuit, the designer must lay down ground rules which, according to his own experience and study, lead to what he believes s good performance.
For the amplifier to be described, the ground rules were:
- The output stage should be push pull.
- The output tubes should be driven by cathode followers.
- The output transformer secondary should be operated single ended.
- Feedback should be achieved entirely by means of resistive network.
- Performance of the amplifier should not be affected by reasonable variations in load or in signal-source impedance.
With the exception of Rule 4, reasons for most of these rules are obvious enough. The reason for Rule 4 is that feedback amplifiers are quite sensitive to distortion introduced in the feedback connection. Where feedback is returned from the output transformer to the cathode of the input tube, nonlinearity in the grid-cathode voltage appears as distortion in the amplifier output. It was for this reason that the present amplifier combines the feedback with the input signal in a resistive network.
Using these criteria, the writer constructed the amplifier shown in Fig. 5 according to the circuit diagram of Fig. 6.
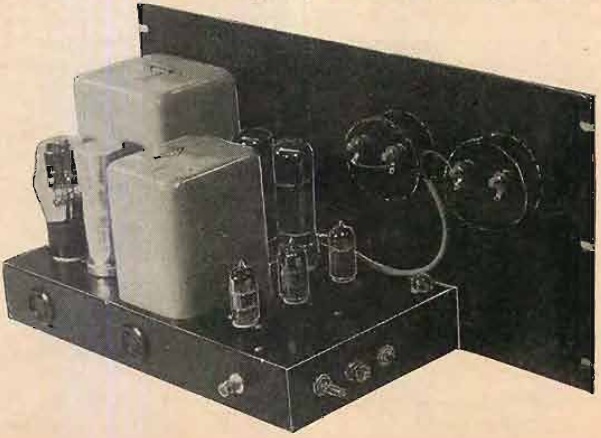
Fig. 5. Rear view of amplifier.
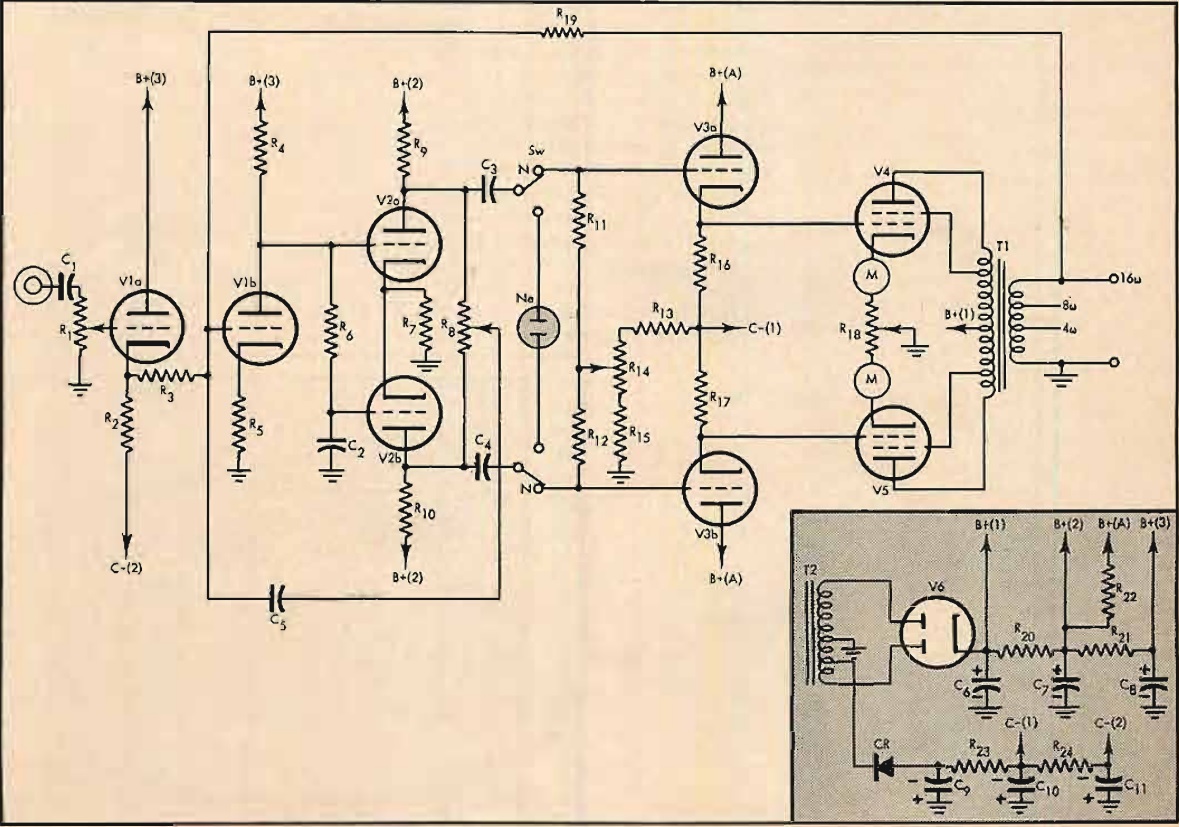
Fig. 6. 50-watt power amplifier.
The output stage consists of push-pull fixed-bias 6CA7’s in a distributed-load circuit with a Triad HSM-189 25-watt output transformer. The grids of the 6CA7’s are directly coupled to the cathodes of the 12AT7, and the fixed bias is applied to the 12AT7 grids. This connection eliminates the large coupling capacitors that would otherwise be required for the 6CA7’s because of the low permissible grid resistance. It also reduces the loading on the phase inverter, permitting it to operate with minimum distortion.
The inverter, a long-tailed pair, is directly coupled to the preceding amplifier. Anode-follower feedback is brought to the grid of the amplifier from two sources: negative feedback from the output transformer, secondary through a 1-megohm precision resistor, and positive feedback through a 0.047-mfd capacitor from a 5-megohm control shunted across the phase-inverter plates. A precision 40000-ohm resistor in series with the input grid of the amplifier completes the feedback network.
The effects of signal-source impedance variations on the feedback are eliminated by a cathode-follower input stage, which is outside both feedback loops. The cathode resistor is returned to a well-filtered negative voltage rather than to ground, which allows use of a large cathode resistor and minimizes the distortion of this stage.
The positive feedback is initially set by breaking the negative-feedback loop and adjusting the 5-megohm control until the amplifier-phase inverter combination begins to oscillate. A push-button switch connects a neon bulb from one plate of the inverter to the other, and simultaneously disconnects the output tubes to prevent damage to them and the loudspeaker during adjustment of the positive feedback.
The experimental circuit uses a 50-ohm control in the output-tube cathode circuits for cathode-current balancing. Balancing is facilitated by two 100-ma meters permanently inserted into the circuit. The fixed-bias control permits the 6CA7 cathode currents to be varied between about 20 to 60 milliamperes each.
With the exception of the positive feedback, no particular pains are taken to achieve high gain in any of the amplifier stages. On the contrary; the absence of a bypass capacitor across the single-ended amplifier cathode resistor insures a low gain.
The power supply is conventional, utilizing a 5V4 rectifier with minimum R-C filtering. The negative fixed-bias voltage is obtained from the 70-volt tap on the power transformer by a silicon rectifier and an R-C filter. It has been found necessary to filter the C- to minimize the hum in the amplifier output.
Amplifier Adjustment and Performance
When the positive-feedback control was centered (resulting in zero positive feedback) and the negative-feedback loop was closed, measurement of the response at low and high levels showed no evidence of a high-frequency peak. The push-button switch disconnecting the output stages and inserting the neon lamp into the circuit was depressed, and the positive feedback control adjusted until the neon lamp indicated that the stages around which positive feedback as connected were oscillating. The push button was released, the output tubes balanced at 50 mA each, and the amplifier was placed in service for a month to insure that all stages were properly aged and stabilized. After this period, the amplifier was subjected to a series of tests to determine its quality.
Tube interchangeability
The first three stages of the amplifier are directly coupled. One might well be anxious about the effects of tube replacement upon the performance of these stages. The first 12AT7, which comprises the cathode follower and first amplifier, is in the most sensitive position. A series of seven randomly selected 12AT7’s was tried in this position, and the inverter plate voltages were checked.
Variation in plate voltage was found to be tell than ±15 volts. The initial positive-feedback setting was correct for five of the tubes; an extremely small adjustment suffices for the remaining two. Evidently, it is within the capability of the amplifier to accommodate a wide range of 12AT7 tubes in the sensitive input position.
The same series of tubes were tried in the cathode-follower driver position. Only slight changes in output-tube current resulted; they were easily corrected by adjusting the bias potentiometer.
It is worth noting that the amplifier operated satisfactorily with 6L6, 5881, and 350B tubes in the output sockets. The maximum power output was. however, diminished. A considerable adjustment of the bias control was required to achieve the recommended cathode currents with these tubes.
Frequency response
The response of the amplifier into a 16-ohm resistive load was measured at 4 and 16 watts. The resulting curves are shown in Fig. 7. They show that the effect of connecting an 0.022-μF capacitor across the output terminals is negligible.
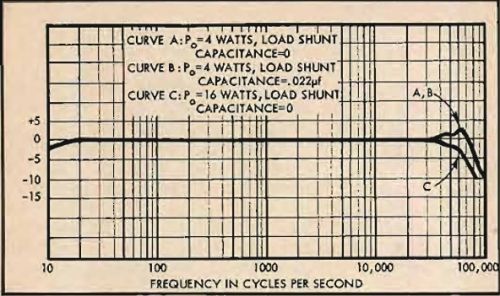
Fig. 7. Response of amplifier.
The drop in response at about 10 cps was deliberately introduced by the input capacitor (C1 in Fig. 6). Without this capacitor, the amplifier tended to maintain a flat response down to d.c. Because the output transformer was not able to handle extremely low frequencies, the amplifier tended to overload severely. Prior to the introduction of this capacitor, objectionably large variations in output-tube plate currents resulted from minor eccentricities in 33 1/3-rpm records.
Distortion
The rms sum intermodulation distortion (60 and 3000 cps, 4:1) was unmeasurable at low levels. It rose to one per cent at a power output of 52 rms watts, as shown in Fig. 8.
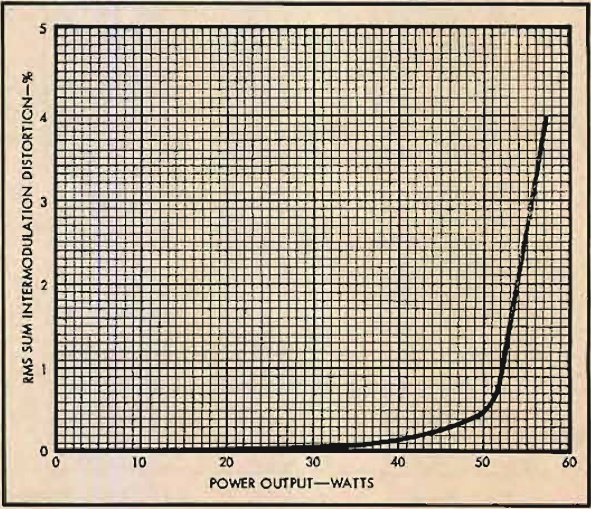
Fig. 8. RMS sum intermodulation distortion of amplifier (60 and 3000 cps, 4:1).
Evidently, the power output of the amplifier was limited by the output tubes rather than the output transformer. Because of the 25-watt rating of the output transformer, the frequency response of the amplifier is doubtless quite restricted at a 50-watt output.
Whether or not a wide frequency response is required at power levels which the amplifier will, in home use, be required to deliver only during unusual transients, is a question each individual must answer for himself. At any rate, the 50-watt frequency response can be improved, if desired, by substitution of a larger output transformer for the one specified.
Hum and noise
The hum and noise at a speaker terminals amounted to 0.01 volt (=6x10-6 watts) with the input shorted. An appreciable portion of this noise was contributed by the C-supply, which probably could have been better filtered. Even with the present circuit, however, hum is inaudible two feet from a highly-efficient speaker.
Output impedance
As is usual with amplifiers of this type, the output impedance is about zero ohms over the audible range. The infinite damping factor contributes to the cleanness of response by preventing hang-over and undesired speaker-cone movement.
Sensitivity
An input signal of 1.1 volts drives the amplifier to 50 watts output, with the input gain control wide open.
Listening tests
Listening tests have been conducted, to date, by amount a dozen critical listeners. Although the tests were separately conducted, most of the listeners used the word “transparent” to describe the reproduction. The amplifier must be heard to appreciate the relief with which the various instruments stand out in reproduced orchestral sound.
PART LIST
R1 250,000-ohm potentiometer
R2 22,000 ohms, ½ watt
R3 40,000 ohms, 5 watt, wire wound
R4 220,000 ohms, ½ watt
R5 6800 ohms, ½ watt
R6 1 megohm, ½ watt
R7 150,000 ohms, ½ watt
R8 5-megohm potentiometer
R9, R10 330,000 ohms, ½ watt
R11, R12 1 megohm, ½ watt
R13 12,000 ohms, ½ watt
R14 25,000-ohm potentiometer
R15 47,000 ohms, ½ watt
R16, R17 15,000 ohms, ½ watt
R18 50-ohm potentiometer
R19 1 megohm, 1 watt, deposited film
R20, R21, R22 27,000 ohms, 2 watt
R23 1000 ohms, 1 watt
R24 4700 ohms, ½ watt
C1 .047 μF, 400 V
C2 0.33 μF, 400 V
C3, C4 0.1 μF, 600 V
C5 .047 μF, 400 V
C6, C7, C8 40/30/30 μF, 475 WV
C9, C10, C11 20 μF, 150 WV
V1, V2, V3 12AT7
V4, V5 6CA7
V6 5V4
CR diode, 200 PIV min., ½ amp (Sarkes-Tarzian F-2 or equiv.)
T1 output transformer, 6600 ohms to voice coil, triad HSM-186
T2 power transformer, 700 V CT, 150 mA 70 V tap, Triad HSM-241
M 0-100 mA meter
SW d.p.d.t. switch, spring return
NE nE-10 neon bulb
1 Boegli, Charles, A 35-watt “Infinite-Feedback” Audio Amplifier, Radio and Television News, July 1954, p. 39.
Boegli, Charles, A 13-watt All-Triode “Infinite-Feedback” Amplifier, Radio and Television News, November 1955, p. 68.
")
")
")
")
")